多普勒激光测振
 www.omscorporation.com
www.omscorporation.com
多普勒激光测振
VibroMet 500V:单点激光多普勒测振仪
原理
VibroMet 500V(及其前身的VibroMet 500和VibroMet 100)是一种外差法激光多普勒测振仪,采用自混合方式将对象光束和参考光束(也称为本地振荡器)在光电探测器表面混合。 >查看更多硬件说明
VibroMet500V包括一个激光探头和一个电子控制器。激光探头包含了二极管激光、布拉格盒、光探测器和前端元件。 查看更多软件说明
VibroMet500V输出模拟的速率信号,可使用任何频谱分析仪记录和分析,或简单地在示波器上观看。 查看更多仪器的功能和测量指标
VibroMet500V主要测量振动速率随时间的变化函数。简单的积分或微分(在软件中提供)将会产生位移和加速度的时间函数。 查看更多应用和实例
VibroMet500V可用于测量振动和噪声有关的大部分应用;特别是对非接触式测量非常重要的应用。 查看更多MB-LDV: 多光束激光多普勒测振仪
原理
MB-LDV是一种外差法激光多普勒测振仪,能使用多光束同时探测目标并同时测量所有点的振动速率。由于在同一时间测量所有的点,所以可以准确测量瞬态事件。 查看更多硬件说明
MB-LDV包括一个光学头和一个电子盒。 查看更多软件说明
MetroLaser开发了一个基本的软件包,允许MB-LDV的用户调整目标距离、定义扫描区域和扫描方法、指定数据采集参数和采集的数据可视化。 查看更多仪器的功能和测量指标
MB-LDV同时测量多点的振动速率随时间的变化函数。简单的积分或微分(在软件中提供)将会产生位移和加速度的时间函数。 查看更多应用和实例
由于MB-LDV可以同时进行大量测量,该系统特别适用于需要快速扫描和/或解决瞬态事件(如冲击)的情况。 查看更多
单点激光多普勒测振仪 - 原理
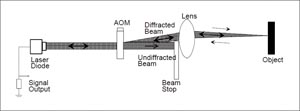
图1 MetroLaser VibroMet 示意图
VibroMet 500V(及其前身的VibroMet 500和VibroMet 100)是一种外差法激光多普勒测振仪,采用自混合方式将对象光束和参考光束(也称为本地振荡器)在光电探测器表面混合。系统采用波长为780nm的二极管激光器来产生对象光束(照亮目标)和参考光束(本地振荡器),由布拉格盒声光调制器(AOM)生成载波频率。光电探测器是二极管激光模块的组成部分,常用来监测激光功率。LDV系统基于专利的电子光学配置,示意图如图1。从激光二极管出来的大多数光转为激光,并通过定制的透镜进行准直。准直光束穿过声光调制器,部分光束产生衍射和频率偏移(通常是35-40MHz)形成对象光束。部分准直光束(零级)没有产生衍射穿过了布拉格盒,被光束阻挡器阻挡。对象光束照亮目标,部分光线被目标散射而返回到声光调制器,光束又产生衍射和频率偏移(合计70-80MHz)。这种效应被称为双频移,这对于生成一个双倍于射频的载波非常有利,这样可以帮助将信号从任意可能的射频噪声中分离出来。频移的对象光束进入二极管激光获得增益并与参考光束(二极管激光器光束的一小部分,用于监测激光功率)混合。这个过程的详情见图2。图1中显示了一个可选的聚焦镜头,用来生成一个小的聚焦光束,用于某些应用。标准的VibroMet 500V不包括聚焦镜头,而只使用准直对象光束。准直光束允许VibroMet500V在从几厘米到几米的距离内工作,无需调整或准直任何光学元件。
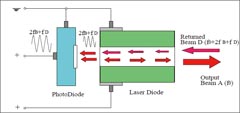
图2 自混合效应
图2说明了VibroMet 500V的自混合效应的原理。返回的对象光束(光束D)进入激光二极管,它和腔内的激光束混合生成一个频率是2fB+fD的信号。这里fB是光束每次通过布拉格盒添加的频移,fD是由于目标振动速度产生的多普勒频移。光信号由一个激光二极管内置的光电二极管检测,产生相应的电信号输出。类似于传统的LDV,这个信号可以被调频解调电路处理成目标的振动频率和振幅。
单点激光多普勒测振仪 - 硬件说明

图3 VibroMet 500照片:激光探头和电子控制器
VibroMet500V包括一个激光探头和一个电子控制器。激光探头包含了二极管激光、布拉格盒、光探测器和前端元件。激光探头还包括一个电子电路,提供4 MHz信号带通,并将信号混合降至10.7 MHz中频,其输出是一个电信号及混合到10.7 MHz的载波频率,信号输入到电子控制器。VibroMet500V还包括一个红色(650 nm)的二极管指向激光可以很容易看到目标上的测量点。VibroMet500(和VibroMet500V一样,只是没有红色指向激光)系统照片如图3.
电子控制器包含
电源、布拉格盒的射频电源和进行中频信号处理和实时模拟振动速率信号输出的PLL模拟解调器。电子控制器的另一个输出是10.7 MHz调制信号,可以在软件中时行数字化和分析。电子控制器包含一个信号强度指示器、一个超范围速率指示器、两个可选择的速率范围和五个可选择的低通滤波器(1,2,5,10和20 kHz),这可以被用来加强某些波段的信噪比。还包括一个安全联锁,用于需要时远程打开或关闭系统。
单点激光多普勒测振仪 - 软件说明

图4 典型的软件界面
VibroMet500V输出模拟的速率信号,可使用任何频谱分析仪记录和分析,或简单地在示波器上观看。MetroLaser开发了软件使用户能使用NI的数采卡(如PCI6220)来采集和分析速率信号。图4显示了一个突出了软件各种功能的典型软件界面。
标记A的箭头用来运行程序。程序可以通过按钮B选择连续运行或单一拍照模式。软件默认由数采卡的通道0进行VibroMet速度输出。这可以通过在“通道字段”(1)输入不同数字来进行修改。通道的默认输入配置是“参考单端”(2)。在上面的例子中,采样率(3)是40000Hz,帧大小(4)是32768点。基于这些设置,VibroMet软件将每0.8192秒(=32768 / 40000)采集一块数据,并显示在上图(速度与时间)(5)中。在图4中,时间范围设成10毫秒,所以整个数据块只有一部分显示出来。下图(6)是上面的图时域数据的傅立叶变换(速度与频率)。
软件可以设置滤波器带宽(7)来匹配VibroMet上的设置(LOW和HIGH)。对于每一个图,右键点击图来打开或关闭“自动量程”。当关闭“自动量程”时,用户可以修改X轴和Y轴的限制。
软件在FFT图(下图)中寻找峰值并计算峰值的频率、速率、位移和多普勒频移(8)。红色垂直光标(9)可以移动查看频谱的不同部分。显示的速度频率等数据通常基于两个光标之间的最大峰值。光标可以拖动到不同的位置,也可以在输入框(9)中输入数字进行移动。软件可以通过增加平均数(10)来平均多个FFT,默认为1。
默认情况下,数采卡的上下限设为10V和-10V(11)。对于在非常小的信号,可以将这些值设得小一些,如1V到-1V,这样更有利。这将增加采集的bit分辨率。
每个VibroMet 500都提供标定常数(12)。每个系统都提供数据表来保证标定常数是正确的。
两个光标之间的平均基底噪声显示在字段(13)中。这个计算的基底噪声是两个红色光标中的平均值;移动光标将改变显示结果。
运行软件时,用户可以选择保存时间和频率数据。要保存数据,点击“保存数据”(14),并选择适当的文件夹和文件名,如'data1.dat'。保存的数据可以用“读取存储的波形”来查看,甚至作为Excel的电子表格来查看。数据以文本格式存储,有四列。第1列存储上图数据点之间的时间步长;第2列是时域值的数组;第3列是FFT图中点之间的频率步长;第4列是FFT值的数组。
要查看保存的数据,使用“读存储的VibroMet文件” 程序。当程序运行(通过点击左上角的箭头),它会提示用户找到存储的数据文件。在此之后,程序运行就像VibroMet 500.exe了。另外一个特点是,用户可以在下图选择显示速率(毫米/秒)、位移(微米)或加速度(米/秒2)。此外在下图的垂直光标,用户可以在时域图上使用光标来窗口化显示不同的数据部分。
多光束激光多普勒测振仪 - 测量指标
MB-LDV同时测量多点的振动速率随时间的变化函数。简单的积分或微分(在软件中提供)将会产生位移和加速度的时间函数。以下是仪器的典型指标:·速率范围:2005年10月,MetroLaser开发了两套系统。一套系统使用100kHz载波频率和大约±50kHz的带宽,相应最大速率13.4 mm/s,这套系统的最小速率能力大约1 μm/s。另一套系统使用10.7 MHz载波和大约±2 MHz带宽,相应最大速率512 mm/s。这套系统的最小速率能力大约30 μm/s。
- 振动频率范围:DC到>20kHz。
- 工作距离:两套独立的可变焦镜头(每套范围都是3:1)提供从0.5m到1.5m或从2m到6m的工作距离。距离可在范围内连续变化,但光学聚焦应保证良好的光线返回。使用后反射材料来制备目标表面将延长工作距离。使用定制的变焦镜头可以达到更远距离。
- 环境要求:MB-LDV LDV系统已经被用于室外接近冰点环境和夏天沙漠环境。产品说明书规定温度范围是3-45℃。
单点激光多普勒测振仪 - 应用实例
VibroMet500V可用于测量振动和噪声有关的大部分应用;特别是对非接触式测量非常重要的应用。应用可分为两大类:1) 具有内在的振动信号的对象和2) 受外部源(如声波或振动台)激励的对象。这两种类型的对象应用于众多行业,包括但不限于:汽车、计算机、医疗、军事、国土安全、乐器、音响设备、工业机械、航空航天、汽车和压缩机。下面仅仅是这些应用的几个例子。汽车发动机
图5显示了在汽车发动机转速从怠速上升到约6000转时VibroMet500的显示。相应的发动机振动谱如图6所示。

图5 测量转速相关的汽车发动机振动
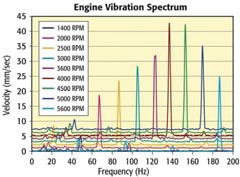
图6 当转速上升时汽车发动机振动速率和频率数据
航空航天
涡轮叶片的振动模式通常在振动台上使用加速度计测量。LDV提供了一个合适的替代品,因为它不会对测试对象加载并且可以在安全距离进行测量。图7显示了使用VibroMet500进行涡轮叶片振动测量。

图7 测量涡轮叶片的振动
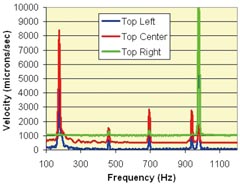
图8 涡轮叶片顶的三个位置的测量速度谱
多光束激光多普勒测振仪 - 原理
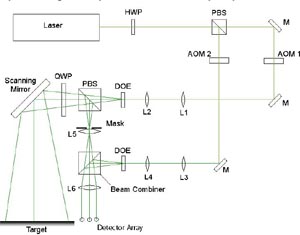
图9 MB-LDV示意图 AOM:声光调制器,DOE:衍射光学元件,HWP:半波片,L:镜头,M:镜子,PBS:偏振分束器,QWB:1/4波片

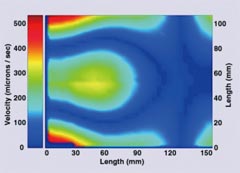
图10 (a)16个光束照亮由压电换能器激励的铝板。(b) 光束在目标板上扫描后获得的相应速率分布图。
MB-LDV是一种外差法激光多普勒测振仪,能使用多光束同时探测目标并同时测量所有点的振动速率。由于在同一时间测量所有的点,所以可以准确测量瞬态事件。此外,一次照射就可以通过测量点之间的相对相位生成模态振动模式。MB-LDV使用单束激光,由一个或两个布拉格盒生成载波频率(在对象光线、参考光线或两束光线上),经过衍射光学元件(DOE)将激光束分成多个激光束,发射光学系统将多光束照向目标,接收光学系统收集每个目标位置的散射光并将散射光聚焦到多个探测器使每个探测器看到并测量一个且只这一个目标位置。这个概念示意如图9。偏振光束分光器(PBS)将激光分成对象光束和参考光束。对象光束经过AOM1后产生频移,经过望远镜(L1和L2)后聚焦到目标。DOE将对象光束分成多个规定模式的离散光束。光束模式可能一条线、一个长方形矩阵或任何其它实际的模式。对于线性模式的光束,扫描镜将光束打在目标上并使光束在目标上扫描,从而获得二维的振动速率图。这个特定的配置如图10所示,十六个光束指向一个由压电换能器激励的铝板,获得铝板的二维速率图。目标上每个被照亮的点散射回来的光经过用于优化光斑尺寸的薄膜后由L5收集。1/4波片(QWP)和接收PBS修改接收信号的偏振极化来匹配参考光束。参考光束也可能产生频移(由于AOM2),然后通过望远镜(L3和L4)和对象光束使用的同一DOE。因此,可以生成与对象光束模式相同的参考光束模式。两组光束在光束组合器中合并,一起经过L6,这个镜头将每对对象/参考光束聚焦到各自的探测器上同时使所有光束对平行。出于方便,探测器阵列可以由一个光纤阵列取代,探测器阵列可以转移到电子模块中。
和上面的配置不同,图11所示的配置将接收镜头(L5)移到PBS后面,这个镜头将是一个更为复杂的f-theta镜头或镜头组。这个配置有非常大的好处,特别是能够改变光束的角度,因此可以选择在目标上照射范围。另一个优点是, 通过改变L5的有效焦距可以改变光源到目标的距离,从而使光束聚焦到目标上。正如在图23可见,由L5或L5后的一个镜子或多个镜子组合所导致的光束模式改变,将在散射光被系统收集时被同一组件逆转,因此,在光束组合器中对象光束和参考光束的光束模式保持相同。请注意,探测器阵列应根据DOE出来的光束模式进行配置。作为例子,MetroLaser建立了4X4光束模式的MB-LDV,由两块相邻的镜子进行反射,每块镜子反射2x4模式。因此,两个独立的2x4模式被用来照亮目标,通过移动一块镜子两种模式可以彼此相对移动在目标形成4x4模式或2x8模式。图12显示了从MB-LDV发出的光束矩阵照亮了一个扬声器来测量振动模式特征。
为便于说明,在图10和图11配置示意图中对象光束和参考光束通路上都有一个AOM。在同样的通路可以使用一个或两个AOM(良好是在对象光束上,可以减少串扰)。使用两个AOM在低速率应用(相对低的多普勒频移)有优势。使用两个AOM可以优化载波频率,比只使用单个的AOM更能满足特定的实验要求,达到更高的信噪比。
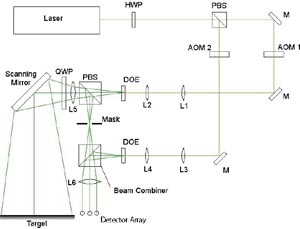
图11 配置了f-theta 镜头的MB-LDV示意图
图12 光束矩阵用于测量扬声器模态模式
多光束激光多普勒测振仪 - 硬件说明

图13 MB-LDV的照片
MB-LDV包括一个光学头和一个电子盒。光学头包括一个频率双倍的532nm Nd:YAG激光器、通常有两个布拉格盒、通常有两个相同的DOE和一套光学组件,将多光束传输到目标并收集多个照亮点的散射光。光学头还有一个光纤阵列,用于多个对象光束及相应的参考光束聚焦。电子盒包含一个连接到光纤阵列的光电探测器阵列、一个模拟解调器阵列(生成所有通道的实时速率历史)和一个配有数据采集卡的计算机,用于速率输出的模拟量数字化并分析数据。电子箱还包括了扫描镜的控制器和布拉格盒的射频电源。图13显示了一个装在三脚架上的新的MB-LDV照片。新的MB-LDV光学头比以前版本大幅减小,极大增强了户外工作的灵活性。
多光束激光多普勒测振仪 - 软件说明
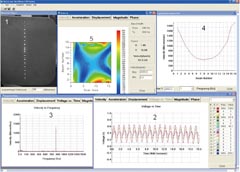
图14 16条光束在振动板中心时的数据
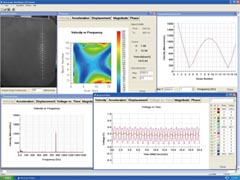
图15 16条光束在振动板右侧时的数据
MetroLaser开发了一个基本的软件包,允许MB-LDV的用户调整目标距离、定义扫描区域和扫描方法、指定数据采集参数和采集的数据可视化。在随附的Powerpoint里也讨论了一个更复杂的软件套件,可以聚焦光束、扫描复杂表面光束、处理抖动、生成三维动画,导出数据到模态分析软件。该软件还控制一个发生器用不同方式来激励目标,如线性调频脉冲、正弦波和其它。一个基本的软件截图见图14。窗口1是实时摄像头视窗,显示由850 Hz正弦波激励的振动铝板上16个光束的位置。窗口2显示了MB-LDV的16个通道中每个通道的时域信号(速率对时间)。独立的复选框可打开或关闭任何通道的显示。图26中显示了三个通道的信号(光束1、4和9)。窗口3显示了16个通道中每个通道的速率和频率谱图。窗口4显示了850 Hz激励频率下16个光束的振动速率分布。在这个例子中,板顶部和底部的光束(1和16)拥有最大的振动速率,而在板中心的光束(7、8和9)具有最小的振动速率。整个板的振动速率空间分布呈现字母U的形状。
一个扫描镜可以用来驱动16个光束扫过目标。在图15,光束已被移到了振动板的右侧。在这个位置,零件的振动则是另一番景象。例如,光束1和光束9的相对相位差约九十度。此外,振动的空间分布呈现W形状,局部最大值出现在末端和中心。用光束扫描整个板,可以生成一个空间速率分布的二维或三维图像,如图15的窗口5所示。图中,Y轴代表光束数,X轴代表板上的水平位置,颜色对应于激励频率时的速率。
多光束激光多普勒测振仪 - 测量指标
MB-LDV同时测量多点的振动速率随时间的变化函数。简单的积分或微分(在软件中提供)将会产生位移和加速度的时间函数。以下是仪器的典型指标:·速率范围:2005年10月,MetroLaser开发了两套系统。一套系统使用100kHz载波频率和大约±50kHz的带宽,相应最大速率13.4 mm/s,这套系统的最小速率能力大约1 μm/s。另一套系统使用10.7 MHz载波和大约±2 MHz带宽,相应最大速率512 mm/s。这套系统的最小速率能力大约30 μm/s。
- 振动频率范围:DC到>20kHz。
- 工作距离:两套独立的可变焦镜头(每套范围都是3:1)提供从0.5m到1.5m或从2m到6m的工作距离。距离可在范围内连续变化,但光学聚焦应保证良好的光线返回。使用后反射材料来制备目标表面将延长工作距离。使用定制的变焦镜头可以达到更远距离。
- 环境要求:MB-LDV LDV系统已经被用于室外接近冰点环境和夏天沙漠环境。产品说明书规定温度范围是3-45℃。
多光束激光多普勒测振仪 - 应用实例
由于MB-LDV可以同时进行大量测量,该系统特别适用于需要快速扫描和/或解决瞬态事件(如冲击)的情况。下面列出了这些要求的一些例子和一个使用MB-LDV检测埋藏地雷的更加详细说明。汽车行业
用16或32光束系统扫描汽车底盘将提高扫描速率并产生关于瞬态振动模式的信息。
航空航天
飞机探伤(如分层、孔洞)需要快速扫描。一些测量使用激光干涉无损检测仪。由于其增强的分辨率(相比数字全息或激光干涉无损检测仪),MB-LDV将这些测量带入到新的层面。
涡轮叶片的振动模式往往需要使用复杂的激励源进行测试,MB-LDV可以瞬间得到叶片的整个表面的振动速率分布图。
流体动力学
一个激光多普勒测振仪已被用来测量湍流的动态结构。工作迄今使用单个激光系统进行扫描。MB-LDV则可以在流场不同位置同时进行测量。
冲击试验
弹道冲击的表面反应需要同时测量表面的所有临界点。请注意,弹道冲击通常持续几毫秒的时间,没有扫描的时间。
